What is Sobel Operator?
The Sobel Operator is a widely used gradient-based edge detection technique in digital image processing and computer vision. It is designed to identify edges by detecting abrupt changes in pixel intensity within an image. Edges typically correspond to object boundaries, texture changes, or significant structural variations, making edge detection a critical preprocessing step for many image analysis tasks. The Sobel operator works by applying two discrete convolution masks (kernels) to an image: one for detecting horizontal intensity changes and the other for detecting vertical intensity changes. These kernels approximate the first-order derivatives of the image intensity function. By combining the responses of these kernels, the Sobel operator produces an edge magnitude image that highlights areas with strong intensity gradients. Unlike very small-kernel operators such as the Roberts edge detector, the Sobel operator uses larger 3×3 kernels. This design introduces a smoothing effect that makes the algorithm more robust to noise while still preserving edge information. Due to this balance between simplicity, noise resistance, and effectiveness, the Sobel operator remains one of the most commonly taught and applied edge detection methods.
Introduction of Sobel Operator
Edge detection is one of the foundational tasks in image processing, as edges convey vital information about object shape, size, and structure. Early research in digital image processing sought simple yet reliable methods to compute image gradients that could highlight these edges efficiently. The Sobel operator emerged as an improvement over earlier methods by combining differentiation and smoothing in a single operation. The Sobel operator was introduced as a discrete differentiation operator that computes an approximation of the gradient of an image intensity function. Its kernels are designed to emphasize pixels closer to the center of the convolution window while reducing the influence of distant pixels. This weighted structure provides inherent noise suppression, which is a significant advantage over simpler operators. In practical applications, the Sobel operator is often used as a preliminary step before higher-level vision tasks such as object detection, segmentation, feature extraction, and image registration. Despite the development of more advanced techniques like the Canny edge detector, the Sobel operator continues to be widely used due to its efficiency, interpretability, and ease of implementation.
Sobel Operator in Detailed
The Sobel Operator Algorithm follows a sequence of well-defined steps to transform an input image into an edge-enhanced representation. Each step is supported by mathematical formulations that describe how gradients are computed and combined.
Step 1: Image Preprocessing
The input image is typically converted to a grayscale image to simplify computations, as edge detection primarily relies on intensity variations rather than color. Let the grayscale image be represented as:
I(x,y)
where x and y denote spatial coordinates and I(x,y) is the pixel intensity.
In some cases, optional smoothing (e.g., Gaussian filtering) may be applied to further reduce noise.
Step 2: Definition of Sobel Kernels
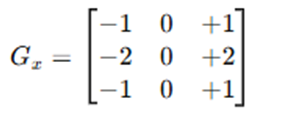
The Sobel operator uses two 3×3 convolution kernels to approximate gradients in the horizontal and vertical directions.
Horizontal gradient kernel (Gx):
Vertical gradient kernel (Gy):
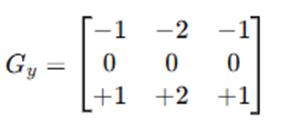
These kernels are designed to emphasize central pixels and detect intensity changes along horizontal and vertical directions.
Step 3: Convolution Operation
Each Sobel kernel is convolved with the grayscale image to compute gradient components:

where * denotes convolution. The results represent the rate of intensity change along the x and y directions.
Step 4: Gradient Magnitude Calculation
The overall edge strength at each pixel is obtained by combining the horizontal and vertical gradient components.
Exact gradient magnitude:

Approximate gradient magnitude (commonly used):

The approximate form is computationally faster and widely used in practice.
Step 5: Gradient Direction (Optional)
The direction of the edge can also be computed as:
This information is useful for advanced processing and edge analysis.
Step 6: Thresholding
To obtain a binary edge map, the gradient magnitude image is thresholded:
where T is a predefined threshold value.
The Sobel Operator Algorithm begins by converting the input image into grayscale so that edge detection can focus solely on intensity variations. Once the grayscale image is obtained, two convolution kernels are defined to detect horizontal and vertical gradients. These kernels are carefully designed to emphasize the central pixel and reduce noise sensitivity.
The image is then convolved separately with each kernel. The horizontal kernel detects vertical edges by identifying intensity changes along the x-direction, while the vertical kernel detects horizontal edges by measuring changes along the y-direction. The outputs of these convolutions represent the gradient components of the image.
Next, the gradient magnitude is computed by combining the horizontal and vertical gradient components. Pixels with high gradient magnitude correspond to strong edges, while low values indicate smooth regions. Optionally, the gradient direction may also be computed to determine the orientation of edges. Finally, thresholding is applied to generate a binary edge map that clearly highlights the detected edges.
How Sobel Operator Works
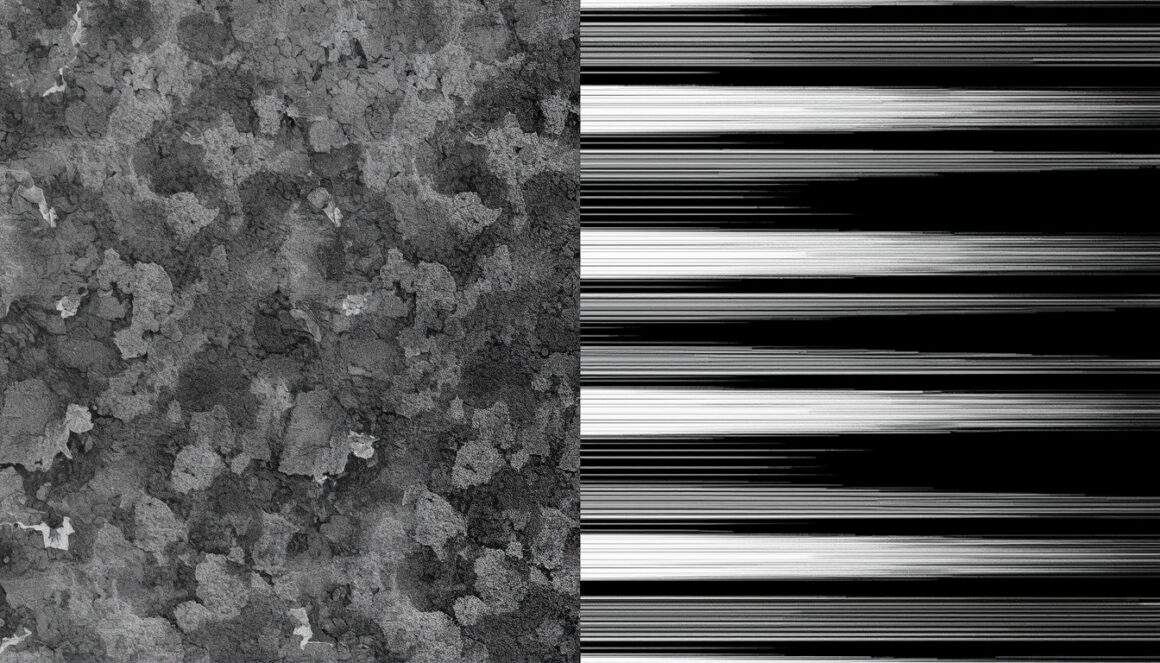
Consider a grayscale image containing a dark object against a bright background. At the boundary between the object and the background, there is a sharp change in intensity. When the Sobel operator is applied, the convolution kernels produce strong responses at these boundaries.
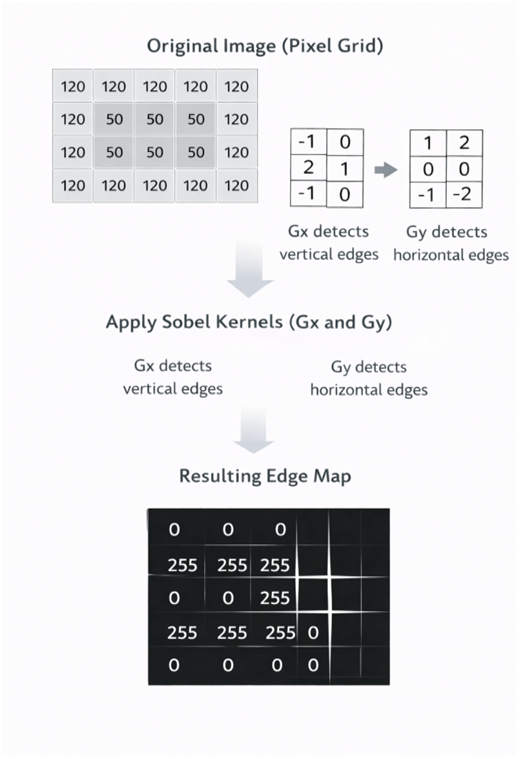
The highlighted values indicate strong edges where intensity transitions are greatest.
Advantages and Disadvantages of Sobel Operator Algorithm
Advantages
- Improved Noise Resistance: One of the primary advantages of the Sobel Operator Algorithm is its improved resistance to noise when compared to edge detectors that use smaller convolution kernels, such as the Roberts operator. The Sobel operator employs 3×3 convolution kernels, which introduce an inherent smoothing effect by assigning greater weight to central pixels. This smoothing reduces the influence of random noise while preserving important edge details, resulting in clearer and more stable edge maps.
- Better Edge Localization: Another significant advantage of the Sobel operator is its improved edge localization. The larger kernel size allows it to capture intensity variations more effectively, producing edges that are more continuous and visually distinct. Compared to very small-kernel operators, Sobel generates more accurate and reliable edge representations, particularly in images with moderate noise levels.
- Computational Simplicity and Efficiency: The Sobel operator is simple and computationally efficient. Its algorithmic structure relies on fixed convolution masks and basic arithmetic operations, making it easy to implement in both software and hardware. This simplicity enables fast execution even on systems with limited computational resources, making Sobel suitable for many real-time image processing applications.
- Gradient Magnitude and Direction Information: An important advantage of the Sobel operator is that it provides both gradient magnitude and gradient direction information. The gradient magnitude indicates the strength of detected edges, while the gradient direction reveals their orientation. This dual information is extremely useful in advanced image analysis tasks such as feature extraction, object recognition, and shape analysis.
- Suitability for Real-Time Applications: Due to its low computational complexity and predictable performance, the Sobel operator is well suited for real-time applications. It is widely used in embedded systems, robotics, and industrial automation, where fast processing is often more critical than extremely precise edge localization
Disadvantages
- Sensitivity to Noise in Complex Images: Despite its robustness compared to smaller-kernel methods, the Sobel operator is still sensitive to noise, especially in highly textured or low-quality images. In such cases, texture patterns and noise may be falsely detected as edges, leading to inaccurate edge maps.
- Thick Edge Output: Another drawback of the Sobel operator is its tendency to produce relatively thick edges. Since smoothing and differentiation are performed simultaneously, the resulting edges are often wider than those produced by more advanced edge detection techniques. This reduces edge precision and makes it harder to identify exact boundary locations.
- Limited Edge Localization Accuracy: The Sobel operator has limited edge localization accuracy when compared to sophisticated methods such as the Canny edge detector. It does not include advanced processing steps like non-maximum suppression or adaptive thresholding, which are essential for producing thin, well-localized edges.
- Fixed Kernel Limitation: The algorithm relies on fixed convolution kernels, meaning it cannot dynamically adapt to complex or varying edge structures. This lack of adaptability reduces its effectiveness in images with intricate patterns, varying illumination conditions, or multiple edge orientations.
- Inferior Performance Compared to Advanced Methods: Due to these limitations, the Sobel operator is often outperformed by more advanced edge detection techniques in high-precision or noise-sensitive applications. In modern computer vision systems, Sobel is frequently used as a preprocessing step rather than as a final edge detection solution.
Applications of Sobel Operator
- Image Preprocessing in Computer Vision: The Sobel Operator Algorithm is widely used in image preprocessing tasks where edge information is required before applying higher-level vision algorithms. It is commonly employed in object detection, image segmentation, and feature extraction to identify important structural information within images.
- Medical Imaging: In medical imaging, the Sobel operator is used to highlight boundaries of organs, tissues, and anatomical structures in modalities such as X-ray, MRI, and CT scans. Although it may not offer clinical-grade precision, it is valuable for preliminary analysis and visualization.
- Industrial Inspection and Quality Control: In industrial inspection and quality control systems, Sobel edge detection is used to identify defects, cracks, and shape irregularities in manufactured products. Its speed and simplicity make it well suited for real-time inspection environments.
- Remote Sensing Applications: The Sobel operator is applied in remote sensing to analyze satellite and aerial images. It helps detect edges corresponding to roads, buildings, and land boundaries, supporting feature extraction and environmental monitoring tasks.
- Robotics and Autonomous Systems: In robotics and autonomous systems, Sobel edge detection supports basic perception tasks such as obstacle detection, navigation, and scene understanding. Its low computational overhead makes it especially attractive for real-time robotic applications.
- Academic and Educational Use: The Sobel operator is extensively used in academic and educational contexts. It serves as a fundamental example for teaching gradient-based edge detection and is commonly included in textbooks, laboratory experiments, and comparative research studies.
Conclusion
The Sobel Operator Algorithm remains one of the most important and widely used edge detection techniques in digital image processing. By combining gradient computation with an inherent smoothing effect, it offers a practical balance between simplicity, efficiency, and performance. Its ability to detect edges reliably while maintaining low computational cost has ensured its continued relevance over decades. Although the Sobel operator does not achieve the precision and robustness of more advanced methods such as the Canny edge detector, its ease of implementation, interpretability, and speed make it an invaluable tool in both academic research and real-world applications. As a result, the Sobel operator continues to play a crucial role as both a standalone technique in simple systems and a preprocessing step in complex image analysis pipelines.
Frequently Asked Questions (FAQs)
Why is the Sobel operator preferred over the Roberts operator?
The Sobel operator uses larger 3×3 kernels that provide built-in smoothing, resulting in better noise resistance and more reliable edge detection compared to the Roberts operator.
What type of edges does the Sobel operator detect best?
The Sobel operator is particularly effective at detecting horizontal and vertical edges due to the orientation of its convolution kernels.
Is the Sobel operator suitable for noisy images?
It is more robust than smaller-kernel methods but still sensitive to heavy noise. Preprocessing steps such as smoothing are often required for noisy images.
Can the Sobel operator be used in real-time systems?
Yes. Its low computational complexity and simple operations make it suitable for real-time and embedded systems.
How does the Sobel operator differ from the Canny edge detector?
The Sobel operator is simpler and faster, while the Canny edge detector provides better edge localization, thinner edges, and stronger noise suppression at the cost of higher computational complexity.