What is Roberts Edge Detector Algorithm?
The Roberts Edge Detector Algorithm is one of the earliest and simplest methods used in digital image processing for detecting edges in images. Edge detection is a fundamental operation in computer vision that aims to identify points in an image where the intensity changes sharply. These points often correspond to object boundaries, texture changes, or significant structural features. The Roberts edge detector works by computing an approximation of the gradient of an image using two small 2×2 convolution kernels. These kernels are designed to measure intensity differences along diagonal directions, making the Roberts operator particularly sensitive to edges oriented at 45 degrees. By highlighting regions with strong intensity transitions, the algorithm effectively extracts edge information from grayscale images. Due to its simplicity and low computational cost, the Roberts edge detector is often introduced as a foundational technique in image processing courses. Although more advanced edge detectors such as Sobel, Prewitt, and Canny have largely replaced it in modern applications, the Roberts operator remains important for understanding the evolution of edge detection algorithms and the basic principles of gradient-based methods.
Introduction of Roberts Edge Detector Algorithm
Edge detection plays a critical role in image analysis, as edges convey essential information about the shape, structure, and geometry of objects within an image. Early digital image processing research focused on developing efficient methods to identify these edges using mathematical operations on pixel intensity values. The Roberts edge detector, proposed by Lawrence Roberts in 1963, was among the first attempts to formalize edge detection in a digital framework. The algorithm is based on the idea that edges correspond to regions with high spatial derivatives. Instead of computing derivatives using large convolution masks, the Roberts operator uses minimal 2×2 kernels, making it extremely fast and computationally lightweight. This design was particularly suitable for early computer systems with limited processing power and memory.
The Roberts edge detector approximates the gradient magnitude of an image by measuring intensity differences between diagonally adjacent pixels. By focusing on diagonal gradients, the algorithm provides a simple yet effective way to detect edges, especially in images with clear and sharp transitions. Although the Roberts operator is sensitive to noise and less accurate than modern methods, it remains an important historical and educational tool. Understanding this algorithm provides valuable insight into the fundamental concepts of gradient-based edge detection and lays the groundwork for more advanced techniques.
Detailed Roberts Edge Detector Algorithm
The Roberts Edge Detector Algorithm consists of a sequence of well-defined steps that transform an input image into an edge-enhanced output image. Each step is mathematically simple yet conceptually important.
Step 1: Image Preprocessing
The input image is typically converted to a grayscale image, as edge detection primarily relies on intensity variations rather than color information. Let the grayscale image be represented as:
I(x,y)
where x and y denote spatial coordinates, and I(x,y) represents the intensity value at that pixel.
Step 2: Definition of Roberts Operator Kernels
The Roberts edge detector uses two 2×2 convolution kernels to approximate the image gradient along diagonal directions.
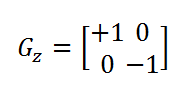
Horizontal (diagonal) kernel:
Vertical (diagonal) kernel:
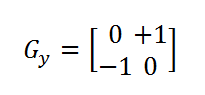
These kernels measure intensity differences between diagonally adjacent pixels, capturing changes along both diagonal axes.
Step 3: Convolution Operation
Each kernel is convolved with the input image to compute the gradient components:

where * denotes the convolution operation. The resulting values represent the approximate gradient along the two diagonal directions.
Step 4: Gradient Magnitude Calculation
The overall edge strength at each pixel is computed by combining the two gradient components. The gradient magnitude is calculated as:

For computational efficiency, an approximation is often used:

Step 5: Thresholding
To obtain a binary edge map, the gradient magnitude image is thresholded:
Where, T is a predefined threshold. Pixels with gradient values above the threshold are classified as edges.
The Roberts edge detector begins by converting the input image into grayscale to simplify processing and focus solely on intensity variations. Once the grayscale image is obtained, two small convolution kernels are defined. These kernels are specifically designed to measure intensity changes along diagonal directions, which allows the algorithm to detect edges that are oriented at 45 degrees. Next, the image is convolved with each kernel separately. This convolution process calculates the difference in intensity between diagonally adjacent pixels, producing two gradient images that represent directional changes in brightness. These gradients capture how rapidly the image intensity changes at each location. The two gradient components are then combined to compute the gradient magnitude, which represents the overall edge strength. Regions with large gradient magnitudes correspond to strong edges, while regions with small values indicate smooth or uniform areas. Finally, a threshold is applied to the gradient magnitude image to classify pixels as either edge or non-edge, resulting in a binary edge map that highlights the structural features of the image.
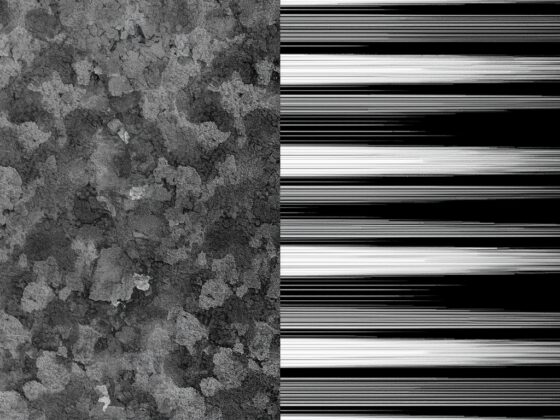
Example of How Roberts Edge Detector Works
Consider a simple grayscale image containing a dark object against a bright background. At the boundary between the object and the background, there is a sharp change in intensity. When the Roberts edge detector is applied, the convolution kernels detect these diagonal intensity differences, producing high gradient values along the boundary.

The highlighted values represent detected edges where intensity changes are strongest.
Advantages and Disadvantages
Advantages
- Computational Simplicity and Speed: One of the most important advantages of the Roberts Edge Detector Algorithm is its computational simplicity. The algorithm uses only two very small 2×2 convolution kernels, which significantly reduces the number of arithmetic operations required during processing. As a result, the Roberts operator is extremely fast when compared to other edge detection methods and is well suited for systems with limited computational resources.
- Low Memory Requirement: Another key advantage of the Roberts edge detector is its minimal memory usage. Since the convolution masks are very small and the mathematical operations involved are straightforward, the algorithm consumes very little memory. This feature made it especially useful in early digital image processing systems and continues to make it relevant in embedded and real-time environments where hardware resources are constrained.
- High Sensitivity to Diagonal Edges: The Roberts operator is particularly sensitive to diagonal edges. Unlike Sobel and Prewitt operators, which mainly emphasize horizontal and vertical edges, the Roberts edge detector captures intensity variations along diagonal directions. This property allows it to detect diagonal structures more effectively in images where such features are prominent.
- Ease of Implementation and Educational Value: The algorithm is easy to implement and understand, making it an ideal educational tool. It is widely used in digital image processing and computer vision courses to introduce fundamental concepts such as gradient computation, convolution, and edge detection. Its mathematical formulation is simple, transparent, and intuitive, which makes it especially suitable for beginners.
- Suitability for Real-Time Applications: Due to its high processing speed and low computational overhead, the Roberts edge detector can be used in real-time applications where approximate edge information is sufficient. In scenarios where precise boundary localization is not critical, the Roberts operator provides a fast and efficient edge detection solution.
Disadvantages
- High Sensitivity to Noise: Despite its advantages, the Roberts Edge Detector Algorithm suffers from high sensitivity to noise. Since the algorithm computes gradients using only neighboring pixel differences, even small intensity fluctuations caused by noise can produce strong gradient responses. This often leads to false edge detection, particularly in low-quality or noisy images.
- Poor Edge Localization Accuracy: Another significant limitation is poor edge localization accuracy. The use of very small 2×2 kernels makes the algorithm highly sensitive to pixel-level variations, which can cause edges to appear thick, broken, or inaccurately positioned. Compared to larger operators such as Sobel and Canny, the Roberts detector provides less precise and less reliable edge boundaries.
- Weak Performance on Smooth or Low-Contrast Edges: The Roberts operator performs poorly when dealing with smooth or low-contrast edges. When intensity changes occur gradually rather than sharply, the gradient values produced by the algorithm may not exceed the detection threshold. As a result, important edges may be missed entirely.
- Limited Directional Robustness: The algorithm lacks directional robustness because it primarily focuses on diagonal gradients. As a consequence, it may not capture horizontal and vertical edges as effectively as other edge detection methods. This directional bias limits its applicability in complex scenes containing edges of various orientations.
- Absence of Noise Suppression and Edge Refinement: The Roberts edge detector does not include built-in noise suppression or edge refinement techniques such as smoothing or non-maximum suppression. Due to the absence of these mechanisms, it is rarely used as a standalone solution in modern image processing applications and is often replaced by more advanced edge detection algorithms.
Applications of Roberts Edge Detector Algorithm
- Educational and Academic Use: The Roberts Edge Detector Algorithm is widely used in educational and academic settings. Its simplicity makes it one of the first edge detection techniques introduced in digital image processing and computer vision courses. It helps students understand core concepts such as image gradients, convolution operations, and basic edge detection principles.
- Embedded and Low-Power Systems: In embedded systems and low-power devices, the Roberts operator can be applied when computational efficiency is a primary concern and hardware resources are limited. In such environments, the algorithm provides a fast and lightweight solution for basic edge detection tasks.
- Pattern Recognition and Shape Analysis: The Roberts edge detector is also used in pattern recognition and shape analysis applications where approximate edge information is sufficient. It helps identify basic structural features, contours, and object boundaries in controlled and low-noise environments.
- Real-Time Image Processing Systems: In real-time image processing systems, such as simple machine vision setups or industrial inspection systems, the Roberts edge detector may be preferred when speed is more important than accuracy. Its fast execution makes it suitable for preliminary edge detection before applying more advanced processing techniques.
- Baseline Method in Research Studies: Additionally, the Roberts operator is frequently used as a baseline or reference algorithm in research studies. Researchers employ it to compare the performance of newer and more sophisticated edge detection techniques, highlighting improvements in edge localization, noise robustness, and overall detection accuracy.
Conclusion
The Roberts Edge Detector Algorithm represents one of the earliest and most influential contributions to the field of digital image processing. By introducing a simple gradient-based approach using minimal convolution masks, it laid the foundation for subsequent edge detection techniques such as Sobel, Prewitt, and Canny. From a theoretical perspective, the algorithm clearly demonstrates how edges can be identified through spatial intensity differences. From a practical standpoint, its simplicity, speed, and low memory requirements make it useful in specific scenarios, particularly in educational contexts and resource-constrained systems. However, the limitations of the Roberts edge detector—such as noise sensitivity, poor localization accuracy, and lack of robustness—restrict its use in modern, real-world applications. As a result, it is often employed as a preliminary or baseline method rather than a standalone solution. In summary, while the Roberts Edge Detector Algorithm may not be the preferred choice for advanced image analysis tasks today, it remains a foundational algorithm that provides valuable insights into the principles of edge detection and the evolution of computer vision techniques.
Frequently Asked Questions (FAQs)
Why is the Roberts Edge Detector considered a basic edge detection algorithm?
Because it uses very small 2×2 convolution kernels and simple gradient calculations, making it one of the simplest and earliest edge detection methods.
What type of edges does the Roberts operator detect most effectively?
The Roberts edge detector is particularly sensitive to diagonal edges oriented at approximately 45 degrees.
Is the Roberts Edge Detector suitable for noisy images?
No. The algorithm is highly sensitive to noise and often produces false edges unless preprocessing techniques such as smoothing are applied.
How does the Roberts edge detector differ from Sobel and Canny?
Roberts uses small 2×2 kernels and has low noise robustness, while Sobel and Canny use larger kernels and include smoothing and edge refinement steps for improved accuracy.
Is the Roberts Edge Detector still used in modern applications?
It is primarily used for educational purposes, baseline comparisons, and simple real-time systems rather than advanced computer vision applications.